

取消
清空記錄
歷史記錄
清空記錄
歷史記錄


 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~
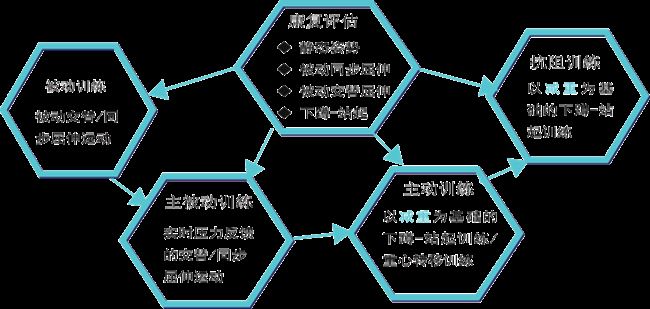
Remo是利用“穩定性、對稱性反饋控制技術”對下肢進行主被動綜合評估與訓練的一款康復設備,通過聯合利用視覺與聽覺反饋進行下肢主動與被動的高頻率重復性訓練,實現增強下肢的運動控制、支撐負重與協調能力等作用,從而改蓋串者的站立,坐-站(站-坐)轉換以及步行能力。

 在IN E HAOU NEL OF NEUROENGINEERING 在JOURNAL OF NEUROENGINEERING AND REHABILITATION(神經工程與康復雜志)發表了于Remo相關的文章。
在IN E HAOU NEL OF NEUROENGINEERING 在JOURNAL OF NEUROENGINEERING AND REHABILITATION(神經工程與康復雜志)發表了于Remo相關的文章。

穩定性與對稱性評估:
額狀面平均擺幅(AS)、矢狀面平均擺幅、額狀面擺幅(MS)、矢狀面擺幅、重心移動軌跡總長度(PL)、重心移動總面積(CA)、平均中心額狀面偏移量、重心軌跡總長度、中心軌跡總面積
擺動幅度參數:
額狀面擺幅、矢狀面擺幅、額狀面平均擺幅、矢狀面平均擺幅擺動頻率/速度參數:額狀面擺動速度、額狀面側方擺速、額狀面擺動次數、額狀面擺動頻率、矢狀面擺動速度
重心參數:
平均重心額狀面偏移量、平均重心矢狀面偏移量、重心軌跡總長度、重心軌跡總面積
關節角速度參數:
左膝比較大角速度、右膝比較大角速度、左膝平均角速度、右膝平均角速度、左髖平均角速度、右髖平均角速度
其他參數:
床板位移、膝關節角度、髖關節角度
關節力矩參數:
左膝承力力矩、右膝承力力矩、左膝平均承力力矩、右膝平均承力力矩、左膝峰力矩、右膝峰力矩、左髖峰力矩、右髖峰力矩做功參數:左下肢做功、右下肢做功、左下肢功率、右下肢功率



-
重心控制訓練
-
對稱性及穩定性訓練
-
主動(抗阻)下蹲站起訓練
-
被動雙側同步(交替)機器人踏步訓練
-
情景互動及任務導向訓練模式:接水果、打飛機、打磚塊、彈球、漫步、偏癱模式
腦血管病、顱腦外傷、脊髓損傷、下肢骨折恢復期引起的下肢運動/平衡功能障礙者的評估與訓練。
適用范圍:
腦血管病、顱腦外傷、脊髓損傷、下肢骨折恢復期引起的下肢運動/平衡功能障礙者的評估與訓練。


Remo是利用“穩定性、對稱性反饋控制技術”對下肢進行主被動綜合評估與訓練的一款康復設備,通過聯合利用視覺與聽覺反饋進行下肢主動與被動的高頻率重復性訓練,實現增強下肢的運動控制、支撐負重與協調能力等作用,從而改蓋串者的站立,坐-站(站-坐)轉換以及步行能力。
在IN E HAOU NEL OF NEUROENGINEERING 在JOURNAL OF NEUROENGINEERING AND REHABILITATION(神經工程與康復雜志)發表了于Remo相關的文章。
穩定性與對稱性評估:
額狀面平均擺幅(AS)、矢狀面平均擺幅、額狀面擺幅(MS)、矢狀面擺幅、重心移動軌跡總長度(PL)、重心移動總面積(CA)、平均中心額狀面偏移量、重心軌跡總長度、中心軌跡總面積
擺動幅度參數:
額狀面擺幅、矢狀面擺幅、額狀面平均擺幅、矢狀面平均擺幅擺動頻率/速度參數:額狀面擺動速度、額狀面側方擺速、額狀面擺動次數、額狀面擺動頻率、矢狀面擺動速度
重心參數:
平均重心額狀面偏移量、平均重心矢狀面偏移量、重心軌跡總長度、重心軌跡總面積
關節角速度參數:
左膝比較大角速度、右膝比較大角速度、左膝平均角速度、右膝平均角速度、左髖平均角速度、右髖平均角速度
其他參數:
床板位移、膝關節角度、髖關節角度
關節力矩參數:
左膝承力力矩、右膝承力力矩、左膝平均承力力矩、右膝平均承力力矩、左膝峰力矩、右膝峰力矩、左髖峰力矩、右髖峰力矩做功參數:左下肢做功、右下肢做功、左下肢功率、右下肢功率
-
重心控制訓練
-
對稱性及穩定性訓練
-
主動(抗阻)下蹲站起訓練
-
被動雙側同步(交替)機器人踏步訓練
-
情景互動及任務導向訓練模式:接水果、打飛機、打磚塊、彈球、漫步、偏癱模式
腦血管病、顱腦外傷、脊髓損傷、下肢骨折恢復期引起的下肢運動/平衡功能障礙者的評估與訓練。
適用范圍:
腦血管病、顱腦外傷、脊髓損傷、下肢骨折恢復期引起的下肢運動/平衡功能障礙者的評估與訓練。





掃一掃,關注公眾號
聯系方式:
021-54483330(總機
)
400-660-3320 (客服)
24小時咨詢: 18201893799微信同號(市場)
客服郵箱:service@ senrao.net
意見反饋:
ceo@senrao.net
公司地址:上海市金山區朱涇鎮萬楓公路258號
互聯網藥品信息服務資格證書:(滬)-非經營性-20200050
滬公網安備 31011602002350號
